[요양뉴스=박지성 기자] 5월 6일, KB금융그룹과 생성형 AI 전문기업 제논(GENON)은 피지컬 AI 기반 시니어 케어 서비스 모델을 시연했다. 현장에서 공개된 돌봄로봇 시연은 약병 전달, 감정적 대화, 기립 시 부분 지지 등 제한된 보조 기능에 집중됐다. 하지만 로봇은 사람을 들어 옮기거나 업는 수준의 물리적 돌봄은 수행하지 못했고, 복잡한 환경에서는 오류도 확인됐다. 정부도 지난 4월 발표한 ‘AI 돌봄기술 전주기 지원 전략’에서 3년 내 현장 적용 기술은 AI·IoT 중심으로 추진하고, 이동·돌봄 보조 같은 ‘피지컬 AI’는 중장기 과제로 제시했다. 돌봄로봇의 현장 투입은 아직 초기 단계라는 의미다.
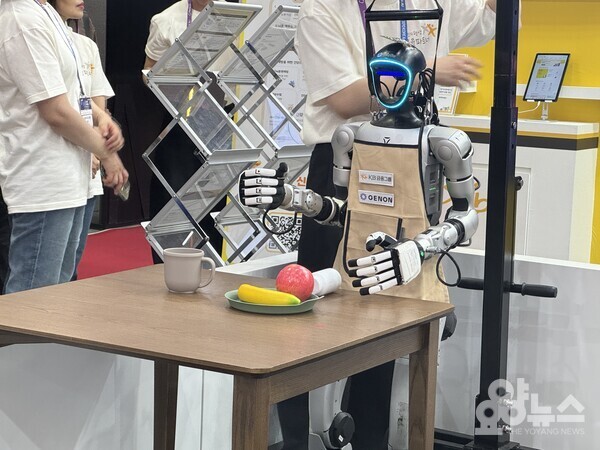 KB금융그룹과 제논이 AI엑스포 전시회 현장에서 돌봄 로봇의 기능을 시연하고 있다. (사진=요양뉴스)
KB금융그룹과 제논이 AI엑스포 전시회 현장에서 돌봄 로봇의 기능을 시연하고 있다. (사진=요양뉴스)현장 시연, 기대보다 좁은 기능 범위
이날 현장에서 업체가 시연한 동작은 사람의 일어서는 동작을 보조하거나 약병을 전달하는 수준이었다. 감정적 대화 기능도 소개됐지만, 실제 요양현장에서 요구되는 체위변경, 부축 이동, 낙상 직전 지지, 침상 이·착석 보조 같은 고강도 물리 지원까지 이어지지는 못했다. 특히 어르신 체중을 어느 정도까지 안정적으로 지지할 수 있는지에 대해서도 구체적인 수치 설명은 제시되지 않았다. 현재 단계의 돌봄로봇이 ‘완전 대체’보다 ‘부분 보조’에 머물러 있다는 점이 확인된 셈이다.
가장 큰 장벽은 안전성
돌봄로봇 개발이 더딘 가장 큰 이유 중 하나는 안전성이다. 사람의 몸을 직접 지지하거나 밀착 접촉하는 과업은 단순 물건 전달과 다르다. 2021년 글로벌 연구기관인 프론티어스(Frontiers)에 따르면, 옷 입히기나 기립 보조처럼 지속적인 신체 접촉이 필요한 작업은 기존 산업용 협동로봇 규제로 기능 제공이 제한적이며, 직접적이고 연속적인 인간-로봇 접촉에 대한 별도의 안전 설계와 분석이 필요하다고 지적했다. 힘 조절이나 위치 판단이 조금만 어긋나도 낙상과 부상으로 이어질 수 있기 때문이다.
돌봄현장은 전시장보다 훨씬 복잡하다
환경 대응도 과제다. 글로벌 학술지인인 네이쳐지에 실린 연구에 따르면 비정형 환경에서는 훨씬 더 복잡하고 강인한 내비게이션과 장애물 회피 시스템이 필요하며, 실제 로봇은 장애물 회피 기능이 있어도 얇은 물체나 복잡한 동선에서 충돌과 경로 오류를 보일 수 있다. 요양원과 요양병원은 침대, 휠체어, 보행보조기, 좁은 복도, 수시로 움직이는 사람들로 이뤄진 공간이다. 짧은 전시장 시연보다 실제 돌봄현장이 훨씬 어렵다는 뜻이다.
실제 수요와 기술 수준 사이에도 간극
현재 연구들이 보여주는 돌봄로봇의 현실적 역할도 비교적 분명하다. 2025년 프론티어스의 연구에서 고령자 지원 로봇은 알림 제공, 물건 집기·전달, 화상통화 같은 일상 보조 과업을 중심으로 업무 수행이 가능한 것으로 평가됐다. 연구진은 고령자의 우선 필요 과업은 분명하지만, 이를 실제로 지원할 수 있는 로봇의 현재 기능과는 여전히 간극이 남아 있다고 분석했다. 다시 말해 기술은 발전하고 있지만, 돌봄현장이 요구하는 수준까지는 아직 거리가 있다는 것이다.
상용화보다 검증이 먼저
돌봄로봇은 분명 고령사회에서 필요한 기술이다. 다만 현재 단계에서 확인되는 것은 ‘상용화 임박’보다는 ‘검증 확대 필요’에 가깝다. 특히 요양현장에 들어오려면 단순 시연이 아니라, 어느 정도 하중을 안정적으로 지지할 수 있는지, 복잡한 공간에서 얼마나 오류 없이 움직일 수 있는지, 돌봄 인력과 어떤 방식으로 역할을 나눌 수 있는지에 대한 데이터가 먼저 축적돼야 한다. 국내의 피지컬 AI 기업 개발 담당자는 관련해 "돌봄 현장은 일반적인 산업현장보다도 훨씬 더 물리적으로 약한 사람들이 존재하는 공간이라는 특수성이 있기에, 이에 대한 체계적인 데이터 축적이 필수적일 수 밖에 없다"고 의견을 밝혔다.
<저작권자 © 요양뉴스, 무단 전재 및 재배포 금지>

